|
||||||||||
| PREV PACKAGE NEXT PACKAGE | FRAMES NO FRAMES | |||||||||
See:
Description
| Interface Summary | |
|---|---|
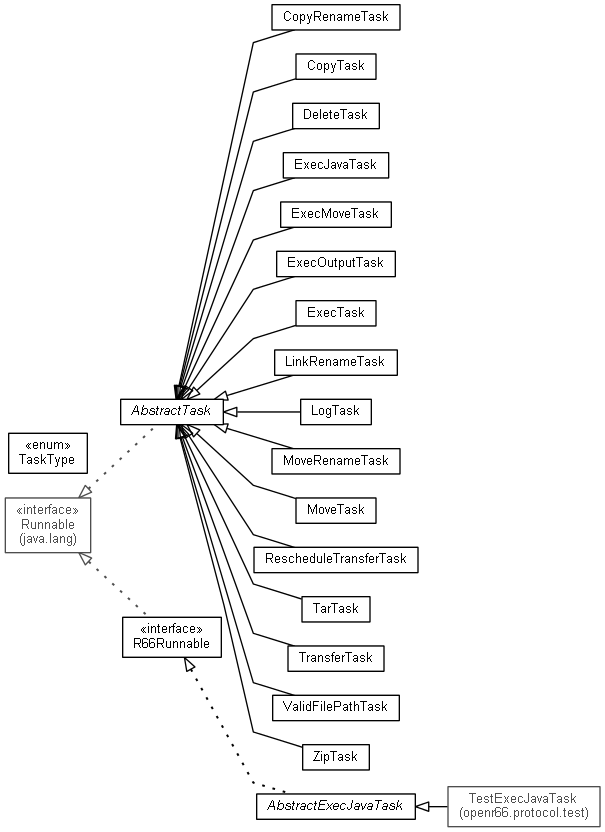
| R66Runnable | Runnable interface for internal R66 tasks (through Rule EXECJAVA, or through message BusinessRequestPacket) |
| Class Summary | |
|---|---|
| AbstractExecJavaTask | Dummy Runnable Task that only logs |
| AbstractTask | Abstract implementation of task |
| CopyRenameTask | Copy and Rename task |
| CopyTask | Copy task |
| DeleteTask | Delete the file. |
| ExecJavaTask | Execute a Java command through Class.forName call |
| ExecMoveTask | Execute an external command and Rename the file (using the new name from the result). |
| ExecOutputTask | Execute an external command and Use the output if an error occurs. |
| ExecTask | Execute an external command |
| LinkRenameTask | Create a link of the current file and make the file pointing to it. |
| LogTask | This class is for logging or write to an external file some info: - if delay is 0, no echo at all will be done - if delay is 1, will echo some information in the normal log - if delay is 2, will echo some information in the file (last deduced argument will be the full path for the file output) - if delay is 3, will echo both in the normal log and in the file (last deduced argument will be the full path for the file output) |
| MoveRenameTask | Move and Rename the current file |
| MoveTask | Move the file (without renaming it) |
| RescheduleTransferTask | Reschedule Transfer task to a time delayed by the specified number of milliseconds,
if the error code is one of the specified codes and the optional intervals of date are
compatible with the new time schedule Result of arguments will be as following options (the two first are mandatory): "-delay ms" where ms is the added number of ms on current time before retry on schedule "-case errorCode,errorCode,..." where errorCode is one of the following error of the current transfer (either literal or code in 1 character: ConnectionImpossible(C), ServerOverloaded(l), BadAuthent(A), ExternalOp(E), TransferError(T), MD5Error(M), Disconnection(D), RemoteShutdown(r), FinalOp(F), Unimplemented(U), Shutdown(S), RemoteError(R), Internal(I), StoppedTransfer(H), CanceledTransfer(K), Warning(W), Unknown(-), QueryAlreadyFinished(Q), QueryStillRunning(s), NotKnownHost(N), QueryRemotelyUnknown(u), FileNotFound(f), CommandNotFound(c), PassThroughMode(p) "-between start;end" and/or "-notbetween start;end" (multiple times are allowed, start or end can be not set) and where start and stop are in the following format: Yn:Mn:Dn:Hn:mn:Sn where n is a number for each time specification, each specification is optional, as Y=Year, M=Month, D=Day, H=Hour, m=minute, s=second. |
| TarTask | TAR task |
| TransferTask | Transfer task: Result of arguments will be as r66send command. |
| ValidFilePathTask | This task validate the File Path according to the follwing argument: - the full path is get from the current file - the arg path is transformed as usual (static and dynamic from information transfer) and should be the beginning of the correct valid path - the full path should begin with one of the result of the transformation (blank separated) For instance "#OUTPATH# #INPATH# #WORKPATH# #ARHCPATH#" will test that the current file is in one of the standard path. |
| ZipTask | TAR task |
| Enum Summary | |
|---|---|
| TaskType | This enum class references all available tasks. |
Classes implementing Tasks for pre, post or error operations
Several kind of tasks exist in OpenR66:
LOG, MOVE, MOVERENAME, COPY, COPYRENAME, EXEC, EXECMOVE, LINKRENAME, TRANSFER,
VALIDFILEPATH, DELETE
Several tasks are possible to run before a transfer starts (pre action),
after a transfer is finished correctly (post action) or after an error occurs
(either in pre or post action or during transfer: error action).
Those actions are defined in one rule. Each rule contains 2 parts:
|
||||||||||
| PREV PACKAGE NEXT PACKAGE | FRAMES NO FRAMES | |||||||||